A Robot That Mimics Human Reflexes
 Massachusetts Institute of Technology researchers have developed a bipedal robot that can react with human-like reflexes via a unique balance-feedback interface.
Massachusetts Institute of Technology researchers have developed a bipedal robot that can react with human-like reflexes via a unique balance-feedback interface.
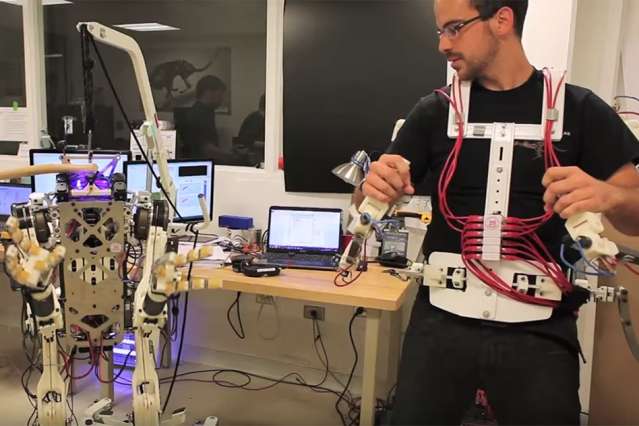
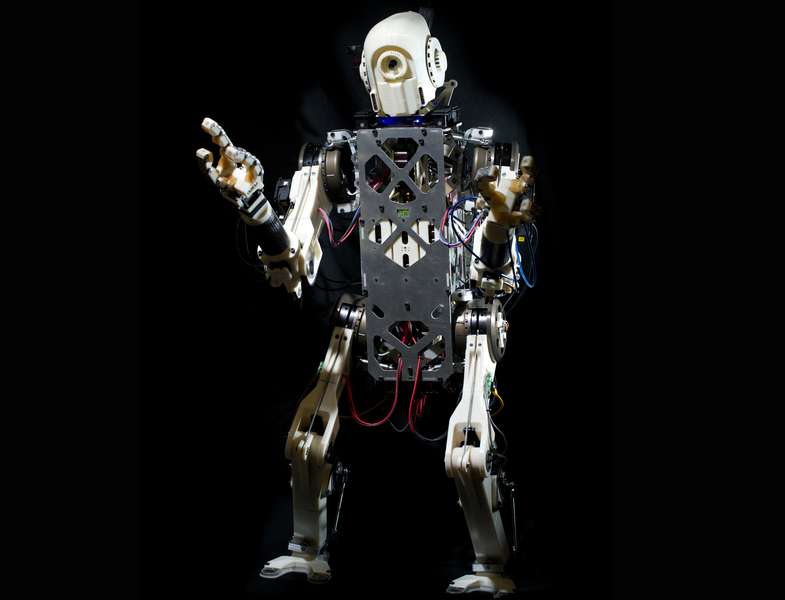
The interface is connected to researcher, Joao Ramos, Ph.D. student of MIT’s Department of Mechanical Engineering, using an exoskeleton of wires and motors. Typically, robots react to balance shifts based on visual feedback from onboard cameras. This can be slow and result in the robot being able to carry out a task, such as bust through a wall, but then fall over. With this new interface the robot, named HERMES, mimics Ramos’ moves and is able to punch through drywall, smash soda cans, and karate-chop boards in half, among other things, while maintaining balance.
“The processing of images is typically very slow, so a robot has difficulty reacting in time,” Ramos said in a university press release. “Instead we’d like to use the human’s natural reflexes and coordination. An example is walking, which is just a process of falling and catching yourself. That’s something that feels effortless to us, but it’s challenging to program into a robot to do it both dynamically and efficiently. We want to explore how humans can take over complex actions for the robot.”
How humans employ these split-second reflexes is not fully understood, and this research may provide an opportunity to learn about how humans master balance during complex tasks.
Eventually, HERMES could ideally be used at a disaster site, able to walk around a potentially dangerous area while guided by a human remotely.
 Ramos, along with Ph.D. student Albert Wang and Sangbae Kim, the Esther and Harold E. Edgerton Center Career Development Associate Professor of Mechanical Engineering, will present a paper on the interface at the IEEE/RSJ International Conference on Intelligent Robots and Systems in September.
Ramos, along with Ph.D. student Albert Wang and Sangbae Kim, the Esther and Harold E. Edgerton Center Career Development Associate Professor of Mechanical Engineering, will present a paper on the interface at the IEEE/RSJ International Conference on Intelligent Robots and Systems in September.
Finding balance
Ramos is able to instantly correct the robot’s balance through a balance-feedback interface that is a large polygonal platform attached to his waist that is essentially the human body’s center of mass. The researchers use sensors on the HERMES feet to determine the force exerted by each foot on the ground. When the robot encounters something, researchers translate the robot’s center of pressure to the platform’s motors, which then puts an equivalent amount of force on the exoskeleton connected to the human, pushing a person back and forth as the robot moves. Researchers determined the robot was in danger of falling if its weight shifted toward the edge of its feet.
For example, in an experiment, HERMES was struck in the torso by a hammer. A comparable force was exerted on the exoskeleton worn by Ramos, who instantly shifted his weight, causing the robot to do the same and catch itself.
“The interface works by pushing harder on the operator as the robot’s center of pressure approaches the edge of the support polygon,” Wang said. “If the robot is leaning too far forward, the interface will push the operator in the opposite direction, to convey that the robot is in danger of falling.”
Hours of data collected regarding the human approaches for balance, may someday lead to new approaches for autonomous strategies for robots to keep from falling.
The Defense Advanced Research Projects Agency (DARPA) provided funding for this research.
Sourced from MIT News




